The emulator tested the behavior of multiple AGVs, all running simultaneously in a manufacturing environment.
The implementation was wire-guided, meaning wires in the floor expressed radio frequencies sensed by the AGVs. The AGV control program causes the AGV behavior to change when sensing a particular frequency with a specific antenna.
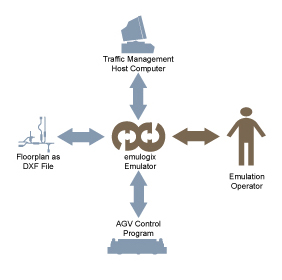
The emulator interfaces with the floor plan as a DXF file. You would change the floor plan using the usual drafting tools, and then re-submit to the emulator to determine the results of the changes.
The emulator interfaces with a host computer traffic manager. The traffic manager determines which parts of the AGV control program to execute. The emulator exposes faults in the traffic manager (crashes or excessive blocking) usually invisible until after installation.
The emulator interfaces with the on-board AGV control program. We change the control program to change the way the AGV reacts to the floorplan and the traffic manager.
The emulator tested all micro to macro scenarios before delivery to the customer site.
|